
环链手扳葫芦的总体构造如何?怎样操作?
环链手扳葫芦的总体构造如何?怎样操作?
编辑:北京凌鹰起重 浏览:5171 时间:2019-07-11
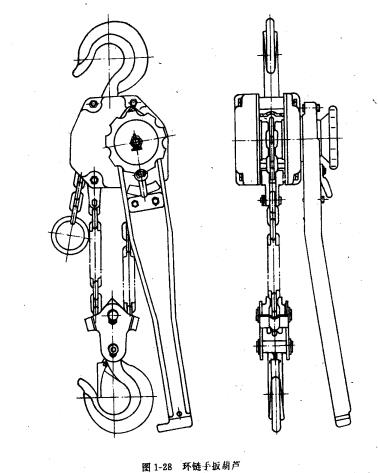
环链手扳葫芦的结构如图1-28所示,它采用一级齿轮转动,主要有齿轮轴、齿轮、制动器、起重链条、链轮、吊钩、操作手柄等。
操作时,先转动手柄上的旋钮使之指向位置牌上“上”的位置(表示吊钩上升),然后扳动手柄,拨抓便波动拨轮,将摩擦片、棘轮、制动器座机压紧座压成一体,并带动齿轮轴及齿轮一起转动,于是链接的内花键上的起重链轮便带动起重链条上升,重物即被平稳地起吊。当要下降重物时,转动手柄上的旋钮指向|“下”的位置,扳动手柄,制动器松开,重物因自重作用而下降,当停止扳动手柄时,重物就停止下降。在棘爪销上海装有脱离机构,空载时可以快速调整吊钩位置。
上一条: 电动葫芦防高处坠落装置的设计
下一条: 一种新型的环链电动葫芦平衡结构介绍

