
阐述低速环链电动葫芦高度检测原理
阐述低速环链电动葫芦高度检测原理
编辑:北京凌鹰起重 浏览:2980 时间:2022-10-28
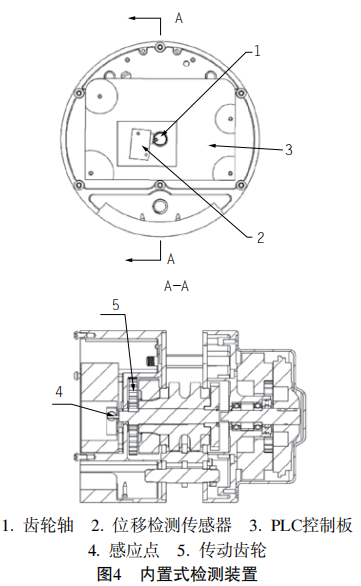
内置式高度检测装置如图4所示,它主要由齿轮轴、位移检测传感器和PLC控制板组成。齿轮轴位于电动葫芦内,齿轮轴贯穿PLC控制板,PLC控制板上设有位移检测传感器,位移检测传感器位于齿轮轴旁,PLC控制板与位移检测传感器电连接,齿轮轴上设有感应点,感应点与位移检测传感器配合。
内置式高度检测装置如图4所示,它主要由齿轮轴、位移检测传感器和PLC控制板组成。齿轮轴位于电动葫芦内,齿轮轴贯穿PLC控制板,PLC控制板上设有位移检测传感器,位移检测传感器位于齿轮轴旁,PLC控制板与位移检测传感器电连接,齿轮轴上设有感应点,感应点与位移检测传感器配合。根据不同葫芦的结构,在葫芦电机的齿轮轴上,布置一个凸起或凹陷的感应开关感应点用于检测该轴的转动圈数。电动葫芦必须配置控制的PLC或单片机,用于处理感应开关检测到轴的转动圈数。每台环链电动葫芦会根据实际链条长度,预先在程序中设定好链条的首位限位点。PLC或单片机程序设定好检测的轴与起重链条运行距离的比例,再根据检测轴转动的圈数计算出链条运行的距离,实时计算出吊钩的高度,当链条运行到限位点时会自动停机,起到限位的作用。
上一条: 电动葫芦防高处坠落装置的设计
下一条: 一种新型的环链电动葫芦平衡结构介绍
其他新闻:
相关产品:

